VS Reference Paths
BikeSim, CarSim, and TruckSim include multibody models that work within global X-Y-Z coordinate systems.
In all three products, the vehicle math model and other moving objects are controlled with use of VS Reference Paths. A VS Reference Path is a continuous line that exists in a horizontal plane with continuity in position and gradient. That is, there are no sharp corners.
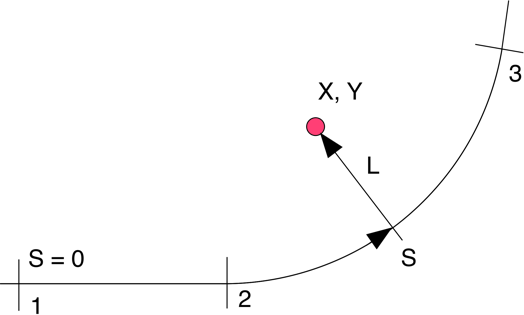
Besides providing a simple means for specifying motion of a simulated object, the path defines a 2D coordinate system for describing locations that are near the path. The path coordinates are station S (distance along the path) and lateral coordinate L (distance a point is from the path, measured on a line that intersects the point and the path, and is perpendicular to the path at the point of intersection.
VS Solvers support up to 500 Reference Paths in memory at the same time. Existing paths can also be redefined any number of times during a simulation, such that there is really no limit to the number of paths that can be used.
Applications of Paths and S-L Coordinates
The main applications for the S and L coordinates associated with a Reference Path are:
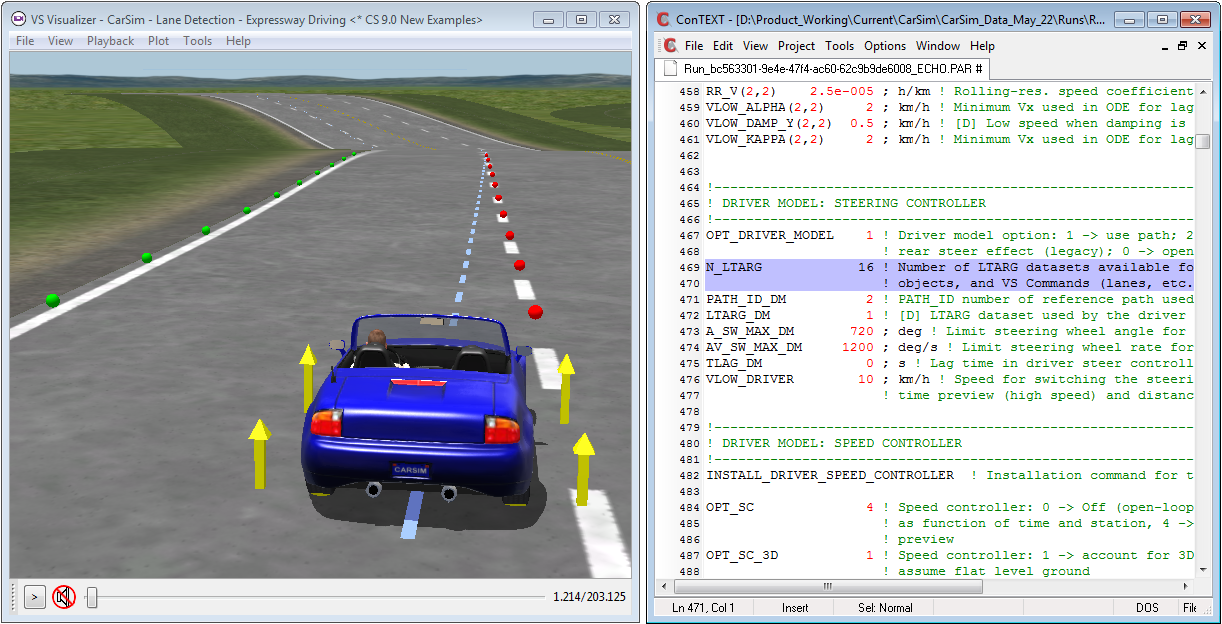
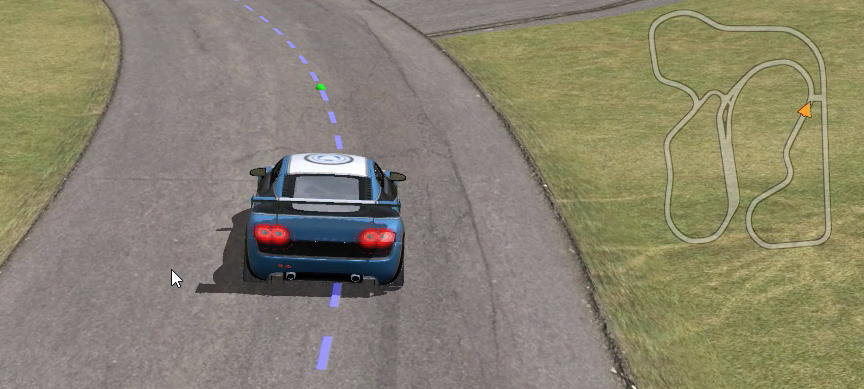
The VS Driver and Rider models work by reducing the absolute value of the L coordinates of preview points ahead of the vehicle relative to a specified target path.
VS Moving objects (traffic vehicles, targets for on-board sensors, etc.) can be located relative to the path using S and L coordinates.
Elevation, tire friction, and tire rolling resistance for a road surface are defined with S and L coordinates associated with specified path.
VS Solvers include a Configurable Function LTARG that defines a lateral offset L as a function of S. This function is typically used together with a Reference Path to define variants of the Reference Path. For example, specify a lane-change maneuver relative to the the Path that defines the centerline of a road. As another example, define multiple lanes relative to a road centerline. Up to 500 LTARG datasets can loaded in memory at any time.
Path Segments
A VS Reference Path is a sequence of contiguous segments. For example, the path shown at the top of this page could be defined with three segments: a straight line going from point 1 to point 2, a circular arc going from point 2 to point 3, and a straight line starting at point 3. Four types of segments are supported:
Simple linear segments defined by length and direction.
Defined either with radius or curvature (inverse radius).
Curvature changes linearly with station, providing smooth transitions.
Specified with tables of X-Y coordinates for complex custom paths.
The path is built from segments starting with an initial global location (X and Y coordinates) and heading angle. Each segment is defined with a type and one or two descriptive parameters. In assembling the path, the VS Solver maintains continuity, such that the starting location and heading of each new segment match the ending location and heading of the previous segment.
Creating Paths
There are several ways to define paths and bring them into CarSim, TruckSim, and BikeSim:
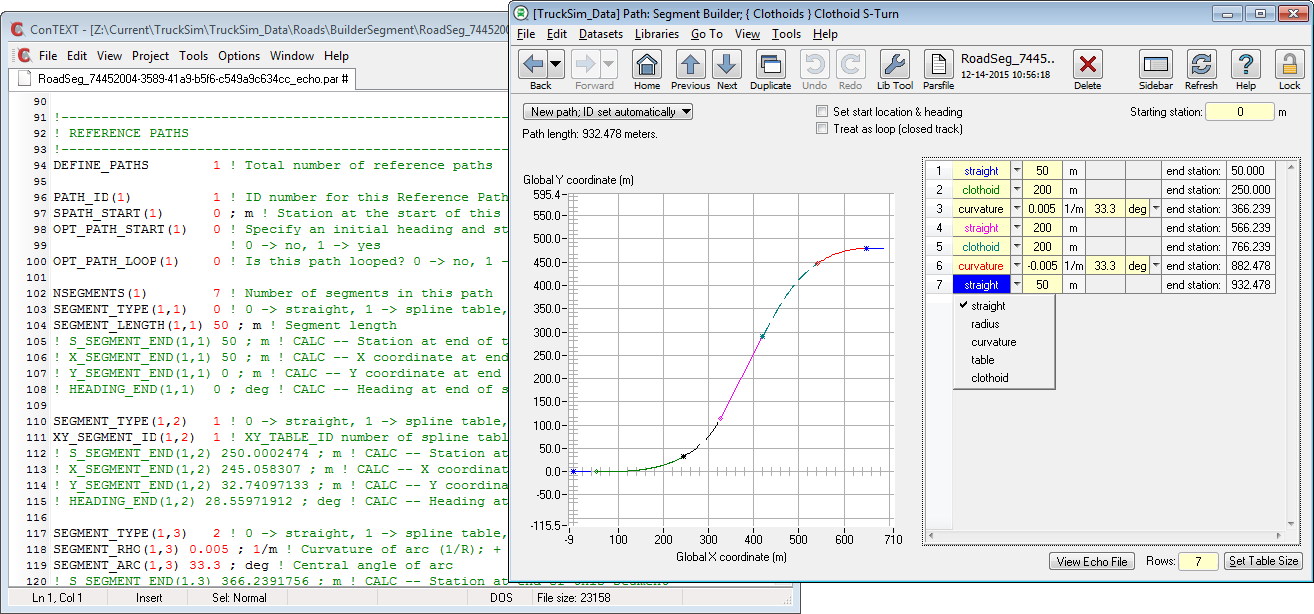
Build the path from segments using the Path: Segment Builder screen (see figure in sidebar).
Build the path from X-Y coordinates using other screens in the Browser GUI.
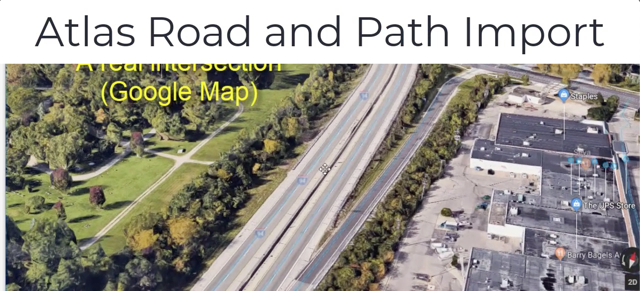
Import path data into the VS database using the Scene: External Import screen, with data from mapping services or Scene Builder.
Video Tutorials
VehicleSim Products
CarSimTruckSim
BikeSim
SuspensionSim
Built-In Features
ADAS: Moving Objects and SensorsAnimation and Plotting
Automation and COM
Built-In Controllers
GUI, Database, and Documentation
Modular VS Math Models
Paths and S-L Coordinates
Roads and Terrain
VS Commands Language
VS Scene Builder Tool
Co-Simulation Technologies
Real-Time HIL SupportSimulink, FMI/FMU, LabVIEW
Unreal Engine
VehicleSim SDK
More
Engineering Services